
21.03.2012
Как я написал в прошлом посте, на днях я собрал робота №2.
Зачем? Причин несколько:
- После того, как я свозил робота несколько раз (пока для ознакомления) на уроки в школу, стало понятно, что их должно быть, как минимум, два. Один должен быть постоянно в школе (чтобы дети могли с ним в любое время заниматься), второй — дома для собственных экспериментов, так как прежде, чем предлагать выполнить что-то ученикам, надо убедится в выполнимости задания.
- Пока я собирал первого робота, стало понятно, что если я хочу развивать это и дальше, то желательно иметь набор соответствующих деталей, чтобы дети могли собрать своего робота сами, а уж потом зарограммировать его действия. А для этого надо проработать основные шаги сборки, на какой платформе, что можно использовать в качестве основного шасси, какие дополнительные модули, источники питания и т.п.
- И последняя причина. Собрав одного робота, хочется собрать второго, а затем третьего. При этом добавляя что-то свое. Но это не значит, что с первым роботом эксперименты закончены… Одно другому не мешает.
Теперь что пришлось докупить:
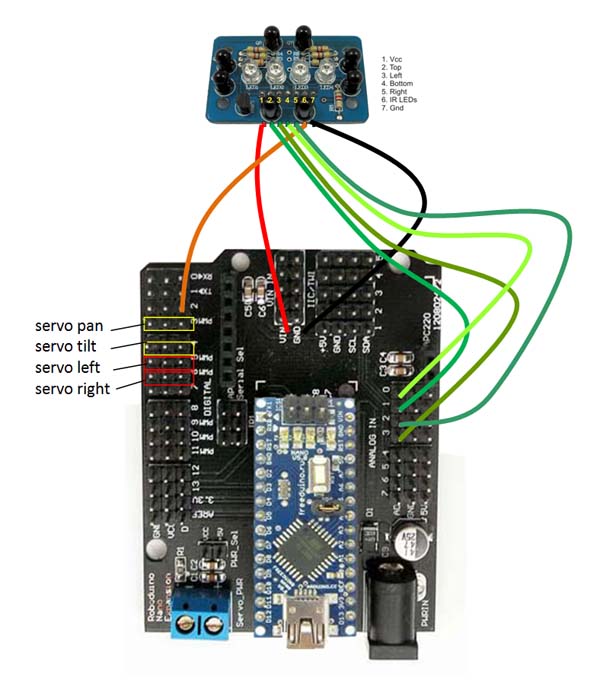
Freeduino Nano v5 (про нее я написал уже немало… одно из главных преимуществ — это размер платы и большее количество аналоговых портов).

IR compound eye (глаз робота остался прежним, но он уже продается готовым)

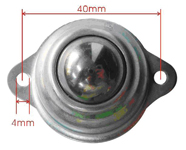
Шаровое колесо
Два колеса

Nano I/O Shield For Arduino Nano (позволит без проблем подключить и датчики, и серво приводы)
Два сервопривода DF15SR 360 degree rotaton servo (сервопривод без ограничения вращения)

Два сервопривода SM-S2309B (для поворотного механизма «глаза робота»)

9g Servo Bracket (набор кронштейнов для крепления сервоприводов поворотного механизма «глаза робота»)

Два батарейных отсека 1xAА для верхнего расположения

Один батарейный отсек 2xAА для нижнего расположения

Закупил побольше разных винтов М3, шайб и гаек к ним, а также стоек латунных для печатных плат 10мм, 15мм, 20мм


Все это было заказано в уже описанном ранее магазине. После того, как этот комплект мне подвезли, можно было приступать к созданию робота. По перечню комплектующих можно понять, что колесная база взята за основу как и у первого робота. И, собственно, мне было интересно: можно ли эту модель собрать из стандартных модулей и сподручных материалов. Какие могут возникнуть проблемы и насколько они будут решаемые.
В процессе стало понятно, что сборка подобной модели не должна вызвать трудностей у учеников. Более того, на базе школы будет проще подготовить шасси для робота, так как есть для этого более подходящее оборудование.
Прежде, чем начать сборку, нужно провести разметку и подготовить шасси (несущую основу робота). Как я и говорил, в качестве шасси будет использована крышка от старого винчестера
Таким образом она выглядела на начальном этапе сборки.

Инструменты, которые понадобятся — это металлическая линейка, штангенциркуль, набор надфилей, и электродрель (лучше сверлильный станок, но этот вариант как раз для школы), отвертки, ножовка по металлу, паяльник, кусачки и пассатижи.

Первым делом нужно разметить расположение всех элементов и просверлить отверстия для последующего их крепежа. Разметку можно сделать несколькими способами.
Первый (наиболее предпочтительный для учебного проекта):
- произвести замеры всех деталей
- построить чертеж в маштабе 1:1 (и определить точное место для каждого элемента)
- затем уже перенести разметку на шасси
Второй — это разметка по месту. Именно вторым способом я и делал.
После разметки обычно кернят центры отверстий. Обратите внимание (если за основу возьмете что-то похожее), что материал, из которого изготовлена была крышка, обрабатывается хорошо, но очень ломкий.
Вот так стало выглядеть мое шасси после небольшой доработки.
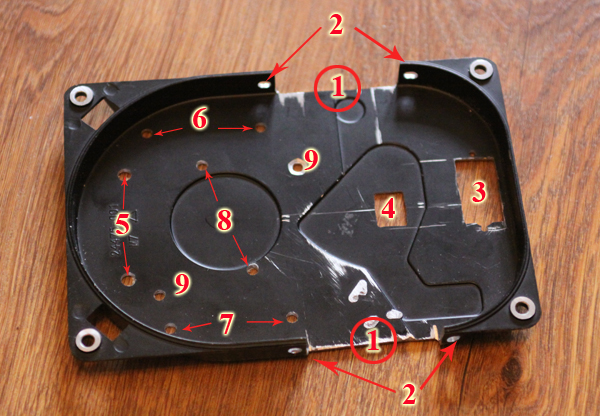
1- посадочные места для ведущих сервоприводов
2 — отверстия для крепежа ведущих сервоприводов
3 — посадочное отверстие для сервопривода поворотного механизма глаза
4 — технологическое отверстие для проводов
5 — отверстия для крепежа шарового колеса
6 и 7 — отверстия для крепежа батарейного блока 1хАА
8 — отверстия для крепежа батарейного блока 2хАА
9 — отверстия для крепежа Nano I/O Shield
Прямоугольной формы добиваемся мелкой доводкой надфилями.
Правда в процессе сборки было добавлено еще несколько технологических отверстий (разметка же была по месту )
Шасси готово, можно приступать к сборке. Первым закрепить пришлось стойку 20 мм, на которую будет крепится Nano I/O Shield , так она впоследствии окажется под сервоприводом. Затем крепим ведущие приводы, шаровое колесо (используя стойки 10 мм) и батарейные блоки.
Вот как это выглядит на данном этапе сборки:
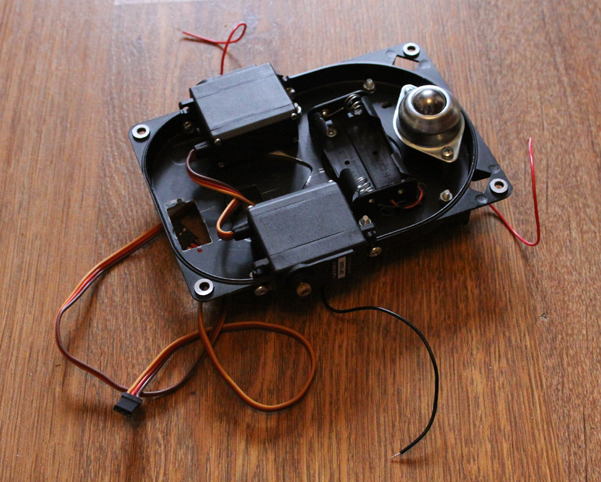
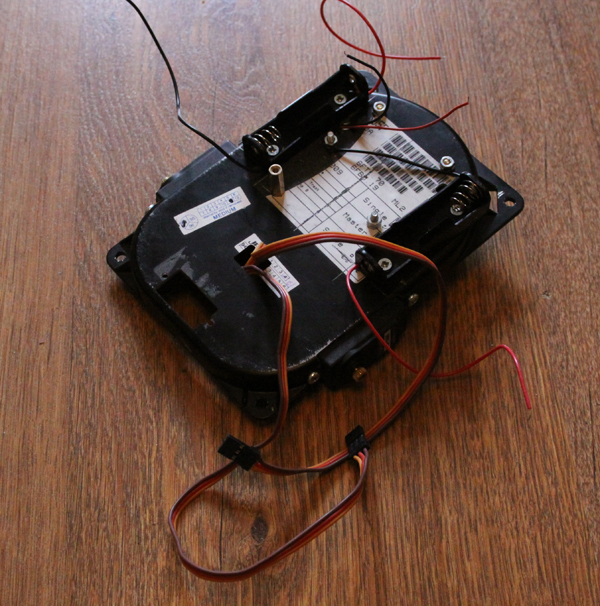
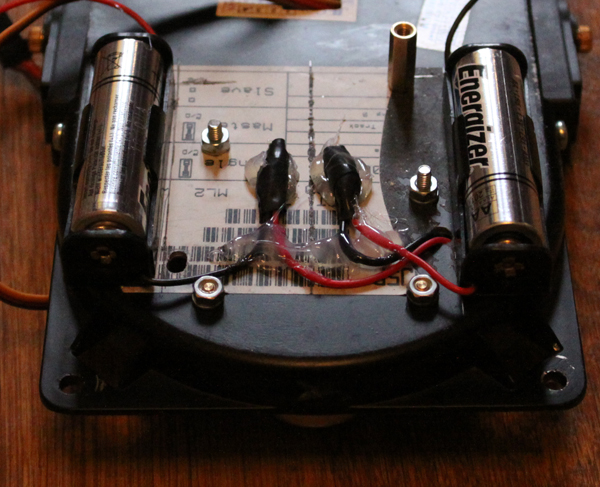
Затем нужно соединить батарейные блоки (и на всякий случай я закрепил провода термоклеем).
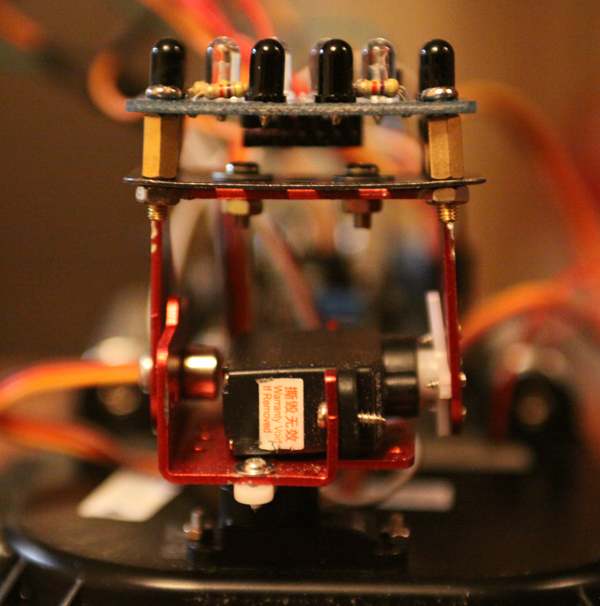
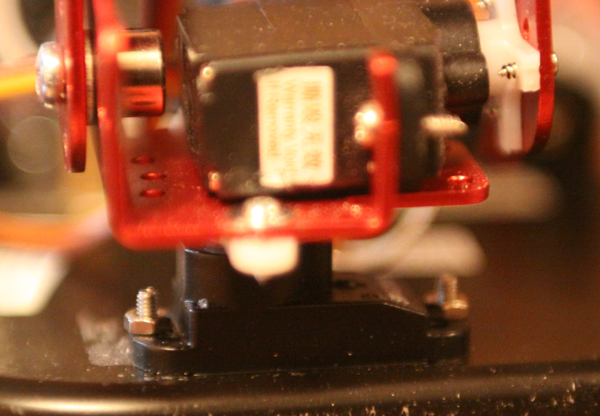
Следующий этап — сборка поворотного механизма глаза и крепления его к основному шасси. Для сравнения привожу две фотографии. Свой вариант сборки (на первой фотографии) и вариант, который я описывал в прошлых постах (на второй фотографии).
В последнюю очередь крепим Nano I/O Shield и устанавливаем в соответствующий разъем Freeduino Nano v5.
Крепим колеса и подсоединяем провода.

После чего робот готов, можно заливать программный код.
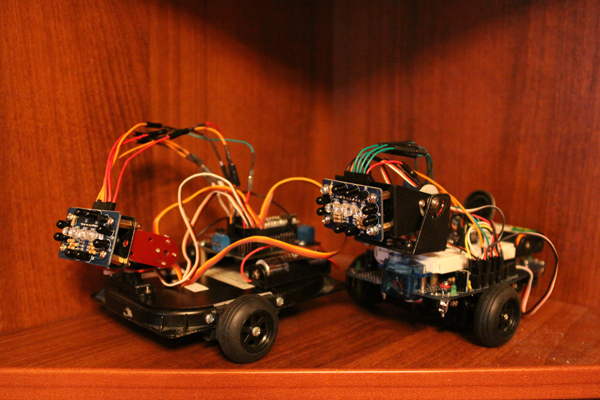
После прошивки (прошивал тем же кодом, что и первого робота… в первую очередь после сборки хочется проверить работоспособность всех агрегатов) я остался более чем доволен. Свой робот, как свой ребенок, самый лучший..
Конечно, он будет совершенствоваться и дальше. Добавится плата подзарядки аккумуляторов, добавятся еще датчики, но пока не знаю, когда это случится.